 大学生创新创业训练计划智能管理平台
大学生创新创业训练计划智能管理平台
于洪波,上海交通大学医学院附属第九人民医院主任医师,教授,硕士生导师。主要从事颌面部畸形、缺损的整复;颌骨发育、再生及生物材料;数字化外科等工作。研究方向:颅颌面数字化外科的开发与应用、颅颌面三维建模及手术虚拟与预测、牵引成骨的研究等。以第一作者或通讯作者发表论文76篇,SCI收录40余篇,授权专利10余项,参编专著7部。主持国家及省部级科研项目14项,参与国家“863”重点项目、科技部重点专项、国家自然科学基金等项目12项。获得上海市浦江人才计划等资助。
1. 平台支持:本团队具有医工以及与科技开发转化公司合作的平台,具有雄厚的研发资金及团队实力,并有多年的合作研发基础,为本项目的实施提供技术支持。
2. 资金支持:提供本项目研究所需的资金及设备。
3. 理论及技术指导:具有医工研发团队,提供技术和理论的指导。
研究背景:
目前手术机器人的术中导航系统大多采用基于红外光线的双目立体相机,需要借助特制的标记装置才能实现对目标的定位跟踪。然而,口腔颌面手术术区大多空间狭小,不便于安装标记装置,且借助标记装置定位的方法在定位(尤其是姿态定位)方面的精度也无法满足应用需求。因此,怎样实现术中精确和实时定位,是目前机器人辅助手术需要解决的技术难点之一。同时,术前-术中影像匹配是将术前设计的目标位置和路径映射到机器人导航空间中的关键环节,直接决定着机器人对目标位置的定位精度以及最终的执行精度。在目前的颌面外科手术中,通常借助术前在病人体内植入的标记物(如钛钉)作为术前和术中影像匹配的同名点特征。但该过程中由于受到术前交互选点误差等因素的影响,造成特征点识别精度较差,使得最终配准精度非常不稳定。如何消除特征点识别误差对配准结果造成的影响,提高配准算法的鲁棒性,也是目前机器人辅助手术流程中的一个技术难点。而单目视觉系统具有结构简单、速度快、误差小和标定步骤少等优点,尤其有利于在颌面部手术机器系统的应用。因此,探索基于单目视觉定位的机器人系统,具有重要的研究价值及临床意义。
研究目标:
构建基于单目视觉定位原理的机器人系统,建立算法实现单目视觉系统引导下机械臂的控制。
研究内容:
(1)组建基于单目视觉定位原理的机器人系统
(2)建立算法,实现单目视觉系统引导下的机械臂控制
(3)通过模型验证单目视觉系统引导下机械臂的精度
研究基础:
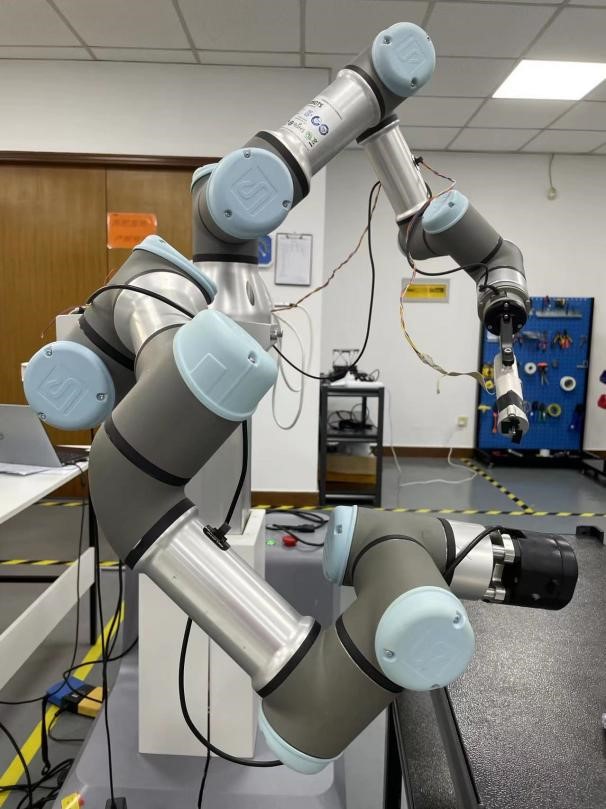
本课题研究结合单目EPNP算法及串联六轴机械臂控制原理搭建了医用手术机器人系统,且课题组基于EPNP算法设计并制作了相机标定配准装置,以提升空间坐标转换及机械臂运作之精准度。标定配准完成后,可利用系统适配软件对机械臂系统下达方案指令,随后按方案设计路线引导机械臂至定点进行单目追踪钻孔。
图 单目相机-串联六轴机械臂系统

预期需要开展工作:
(1)单目视觉系统的图像采集和空间定位的算法建立;
(2)几轴机械臂位移和定位的算法建立(是否与以往的算法有不同);
(3)基于单目视觉导航系统的机械臂位移和定位的精度验证。