大学生创新创业训练计划管理系统
大学生创新创业训练计划管理系统
[1] 2024.10-2027.9 上海市自然科学基金面上项目,被动旋转柔性压电扑翼力学机理和机械感知方法
[2] 2023.1-2024.12 ‘深蓝计划’基金面上项目,全向宽流速压电-电磁混合式海浪俘能机构设计与海洋传感功能研究
[3]2020.1-2022.12 国家自然科学基金青年基金,基于尾流驰振的低速水流压电能量采集器分岔机理及性能研究
[4] 2019.7.1-2022.6.30 上海市自然科学基金面上项目,压电自参数吸振器目标能量转移机理和非线性振动控制研究
[5] 2019-2021长聘教轨助理教授科研启动项目,折纸超材料力学性能分析
1. 指导教师熟悉本项目研究背景、研究内容和研究方法
2. 指导教师拥有相应理论与实际实施的基础与经验。
3. 指导教师会定期组织会议研讨项目进展,对研究过程中出现的困难与问题进行答疑。
4. 指导教师支持团队成员之间的分工合作,鼓励合作精神,会对项目进行充足的经费配套。
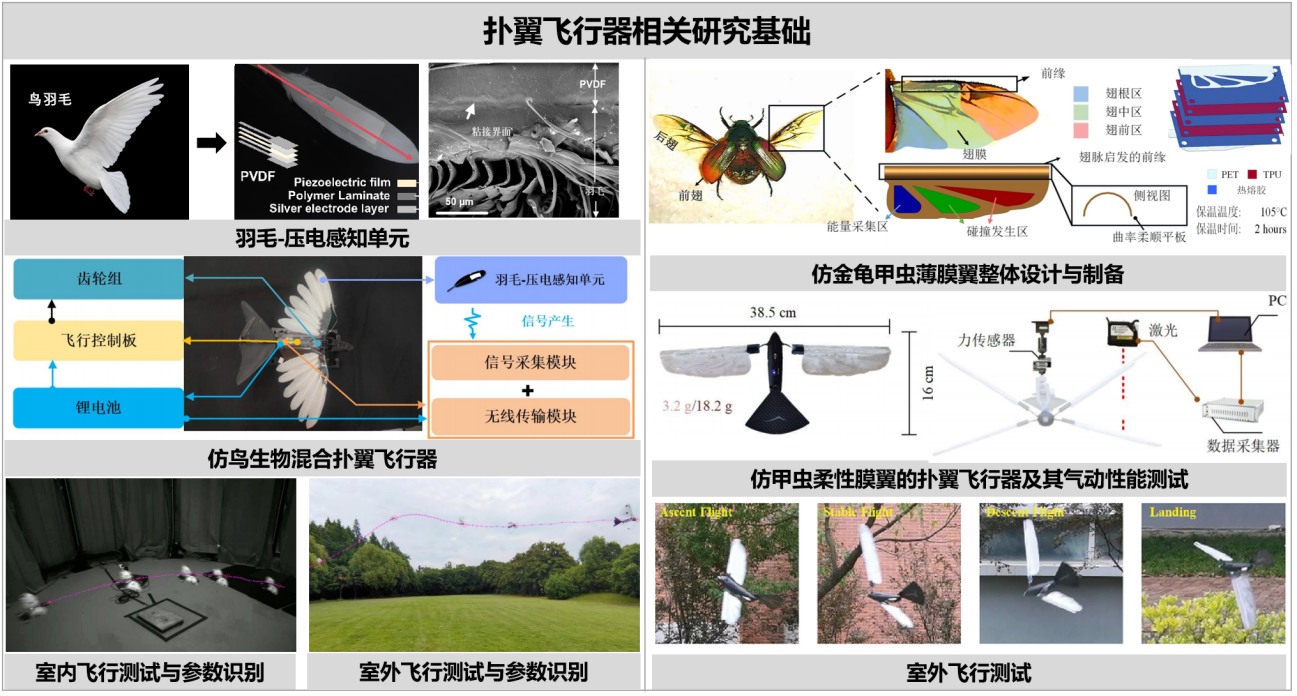
(一) 项目简介(200字以内) 扑翼飞行器以其微型化、高机动性和良好的隐蔽性等优势,在军事侦察和环境监测等领域具有重要的应用潜力。自然生物表现出了优异的飞行特性,受自然生物启发,研制具备感知能力的多功能扑翼对新一代微型扑翼飞行器发展至关重要。机翼的灵敏高效的感知能力作为运动反馈控制的重要一环,能感知扑频、风速、扑动角度等飞行状态参数,为实现机动飞行提供必要条件;另外通过构造机械仿生系统,也可进一步揭示生物学基础理论。 (二) 研究目的 通过电生理实验和深度学习方法,探索昆虫不同运动模式下的电生理响应特性,并结合仿生技术开发多自由度运动平台及数据库,使用压电传感器获取昆虫运动时的翅膀形状数据,进而解析膜翼飞行器的升阻力特征与运动状态参数。最终,通过迁移学习构建卷积神经网络,实现在扑翼机器人飞行过程中对其飞行状态的连续感知,为仿生机械感知系统设计提供生物学与计算方法上的理论支持和技术依据。 (三) 研究内容 1.通过电生理实验,研究不同运动模式下昆虫的电生理响应特性。为仿生机械感知设计提供生物学理论依据。 2.搭建仿生膜翼多自由度运动平台,构建飞行工况-压电信号数据库。 3.基于深度学习方法解析压电信号的复杂时空特征,建立膜翼升阻力特征重构以及运动状态参数的识别方法。 4.通过迁移学习构建能连续感知扑翼机器人飞行状态参数的卷积神经网络,验证扑翼飞行器的具身气动感知能力。 (四) 国、内外研究现状和发展动态 在过去30年中,研究人员对鸟类及昆虫的飞行行为表现出了浓厚的兴趣,各种各样的扑翼飞行器逐渐问世。对生物飞行的气动机制的研究[1-3]促进了拍打翼微型空中飞行器(FWMAVs)系统设计的发展。如Jafferis[4]等人在2019年实现了昆虫大小的扑翼微型飞行器RoboBee,De Croon[5]等人在2009年实现了3.07克重的视觉识别微型飞行器DelFly,Hoang Vu Phan[6]等人在2017年实现了角速率反馈控制的21 g仿昆虫无尾扑翼微型飞行器KUBeetle,张杰等人在2017年实现了蜂鸟飞行器Purdue Hummingbird。虽然这些FWMAV在小规模上提供了比四轴飞行器[7]和固定翼无人机[8]更高的敏捷性和能量效率,但它们在飞行控制逻辑以及结构设计上仍有缺憾,例如在有风的环境下这些扑翼飞行器就难以平稳飞行[9]。为了控制FWMAVs,通常使用传感器和反馈系统,其结合惯性测量单元(IMUs)、视觉摄像机和比例-积分-微分控制器[10]。然而,由于几个原因,它们不足以控制FWMAV。首先是IMUs往往位于扑翼飞行器主体上,需要通过机体的运动来检测干扰,导致IMUs的延迟[11];另外这些传感器主要适用于刚性扑翼,难以处理柔性扑翼的复杂气动特性[12,13]。因此在当下,为提升在复杂气动环境中的作业效能和安全性,如何使扑翼飞行器同时具备卓越的飞行性能和灵敏的流场感知能力——是扑翼飞行器开发与研究的重要挑战之一。 (1)飞行器压电感知 生物的自适应智能行为强调了驱动-感知的闭环,鸟类复杂行为的实现以及稳定飞行依赖于其翅膀上触觉感受器对于瞬间压力和振动、空间流场的感知与快速响应。为飞行器赋予感知能力是构建新一代仿生具身智能飞行器的重要环节,而现有基于离散式传感器的测量体系在空间分辨率、动态响应速率及本体兼容性等方面已显露体系性局限,严重制约飞行器对复杂流场的实时感知能力。在此背景下,压电感知技术因其本征的力-电耦合特性,对微小且高频振动响应灵敏[25,26],为构建嵌入式的飞行器具身智能感知网络提供了可行路径。 哈佛大学Jayaram等人[27]提出了一种基于压电双晶片致动器的传感方法,通过表征致动器的压电特性,实现了对微型扑翼机器人机翼位置的实时感知,并将其作为闭环反馈来控制微型扑翼机的腿部轨迹。华中科技大学Xiong等人[28]使用压电材料锆钛酸铅陶瓷(PZT)开发了对动态刺激高度敏感的柔性智能传感皮肤,蒙覆于飞行器表面,可用于外部气流动态感知和内部结构健康监测。吉林大学Liu等人[29]将压电材料聚偏二氟乙烯(PVDF)作为扑翼飞行器的翼膜材料,进行了区域分割的机翼扑动测试,通过解析机翼形变-压电电压耦合映射关系可实现对飞行器的气动升力感知和颤振情况检测。上海交通大学Hou等人[30]制作了类甲虫膜翅结构的仿生智能翼,能够通过压电材料在三个膜场中的电压信号来感知扑翼频率、变形和碰撞,从而实现对飞行器姿态的调整。上海交通大学Li等人[31]利用天然羽毛的生物材料和结构来增强机械感知的差异化,集成轻质的PVDF薄膜来模拟鸟类翅膀机械感受器的功能,通过卷积神经网络实现了对扑频、风速和俯仰角等多飞行参数的本体感知和准确识别,这种生物混合体感知设计为更轻、集成度更高、更隐蔽的仿生扑翼飞行器发展提供了新的思路。 (2)飞行器机械感知算法 传统机械感知方法面临感知参数单一、实时性不足等问题[32]。随着深度学习算法的快速发展,基于机器学习的人工智能技术通过数据驱动与物理规律的深度融合,为复杂传感信号的动态非线性特征解析提供了新范式[33,34],推动了飞行器感知系统向集成化、轻量化和智能化的发展,是构建扑翼飞行器具身感知系统的强大助力。 具身感知的实现不但依赖于对飞行状态的精确掌握,还需要能够积极响应气动载荷的动态变化,从而帮助飞行器实时调整飞行策略,确保在多变环境中的稳定性和适应性。以神经网络为代表的深度学习算法已在飞行器传感器信号处理中得到了广泛应用。在固定翼飞行器领域,Beuken等[35]使用人工神经网络(ANN)对机翼上柔性电容应变传感器阵列的信号进行解码从而实现了飞行器攻角和侧滑角的识别。Gong等[36]使用多层感知器(MLP)神经网络分析传感器信号,不但实现了对攻角和侧滑角的感知,还能够识别相对气流速度。针对冲击载荷监控问题,Leclerc等[37]提出了一种结合分类器和回归算法的冲击位置监测算法,通过分类器初步预测冲击范围,再基于MLP锁定冲击位置。Khodaei等[38]建立了基于MLP的ANN结构,实现了基于信号的最大振幅和抵达时间的冲击位置高精度识别。更进一步地,Xiong等[39]使用卷积神经网络(CNN)实现了基于柔性压电传感器阵列的机翼被动冲击监测和高精度定位。此外,De等[40]提出了一种冲击力重建算法,通过时间反转方法(TR)定位冲击位置,再使用基于分层径向基函数(RBF)的插值法重建力-时间曲线。Ji等[41]同样针对固定翼机翼的瞬态载荷重构问题,建立了冲击力和应变响应之间的理论传递函数,在此基础上应用小波反卷积方法成功重建了冲击载荷的时序特征。在多旋翼领域,Tagliabue等[42]建立了一个基于双层长短期记忆网络(LSTM)架构的循环神经网络(RNN),基于在六旋翼飞行器上对称布置的两个气流传感器的反馈和飞行器的运动参数实现了对相对气流速度的感知,并在此基础上通过无迹卡尔曼滤波(UKF)估计作用在飞行器上的阻力。 上述智能感知方法均基于固定翼和多旋翼系统的特点开发。相比于扑翼飞行涉及动态失速等非定常气动效应,翅膀在扑动运动和气动载荷的作用下发生动态非线性变形,固定翼与多旋翼飞行器的感知模型关注于刚性机翼在准定常流场环境中的响应特性,对扑动-气动载荷耦合变形特征的解码能力不足,难以有效识别扑翼的飞行参数和气动载荷信息。 为了解决扑翼感知问题,研究者通过融合深度学习方法与生物感知系统特性,开发了面向扑翼飞行器的智能感知算法。Li等[43]构建了一种基于鸟羽和压电材料的生物混合扑翼飞行器并提出了基于卷积神经网络(CNN)的智能感知方法,使用滑窗法采集羽毛-压电感知结构的反馈信号作为输入,结合灰狼优化算法(GWO),实现了风速、扑动频率、攻角和翼型的实时识别。Kim等[44]从昆虫翅膀上获取灵感,设计了一种基于应变传感器的感知控制系统,不仅使用一维CNN实现了风速和风向的分类识别,还通过一个基于强化学习(RL)的端到端控制系统实现了自主悬停和无风环境下的飞行路径控制。上述研究表明了卷积神经网络智能方法在挖掘扑翼飞行器传感器信号中飞行特征的潜力,但其传感系统均采用卷积神经网络处理单个应变感受器的反馈信号,仅通过解码局部应变信息获取特定的少量参数,难以通过该方法实现翼面载荷分布等多维力特征的精确识别。另一方面,由于卷积神经网络依赖卷积操作提取信号中的局部特征,在实时信号识别任务中不可避免地会丢失长期时序特征,无法有效捕获高机动飞行中的动态时空变化。 相较于CNN擅长提取信号中的局部特征,LSTM更能够有效捕捉时间序列中的动态变化和长期趋势。例如,Mao等[45]建立了一个基于多层长短期记忆(LSTM)神经网络的时空多模态触觉传感系统,基于物体接触的热传导过程中获得的动态和准稳态触觉信号实现了对材料的压力、温度、热特性和粗糙度的集成化感知。更进一步地,通过结合CNN和LSTM,能够更好地利用时间序列数据的局部和全局结构,提高模型的预测准确率。Hu等[46]提出了一种深度学习网络,通过不同的卷积核大小和卷积操作提取短期时序特征,同时结合CNN和双向长短期记忆网络(BiLSTM)来增强对长时依赖特征的捕捉能力,有效挖掘地挖掘了脑电波信号中的时空信息并显著提高了人体疲劳检测的精度;在此基础上,Chen等[47]引入了注意力机制,提出了一种CNN-BiLSTM-Attention算法,使用滑窗法读取人体运动过程中的加速度和角速度数据,通过CNN提取空间特征,而BiLSTM则捕捉时间依赖性,注意力机制进一步强化了关键特征提取,实现了坐立运动过程的精确识别。该研究表明融合了CNN和LSTM的新型神经网络架构在提取信号动态时空变化特征、实现运动过程的高精度实时识别的应用潜力,为解决扑翼飞行器多维载荷动态感知提供了解决思路。 总体来说,利用深度学习算法建立从机械感受器信号到环境特征的方式是简洁且有效的。但是现有扑翼感知方法建立于卷积神经网络对局部应变信息的解析,不但在多维力特征解码问题上性能不足,而且受限于卷积神经网络特性难以发掘时序特征,在实时机械反馈任务中会引入精度上的损失。为此,需要基于CNN-LSTM-Attention混合架构建立针对扑翼多维力动态特征的智能感知神经网络模型。 [1]Ansari, S., ?bikowski, R. & Knowles, K. Aerodynamic modelling of insect-like flapping flight for micro air vehicles. Prog. Aerosp. Sci. 42, 129–172 (2006). [2]Ma, K. Y., Chirarattananon, P., Fuller, S. B. & Wood, R. J. Controlled flight of a biologically inspired, insect-scale robot. Science 340, 603–607 (2013). [3]Chen, Y. et al. Controlled flight of a microrobot powered by soft artificial muscles. Nature 575, 324–329 (2019). [4]Jafferis, N. T., Helbling, E. F., Karpelson, M. & Wood, R. J. Untethered flight of an insect-sized flapping-wing microscale aerial vehicle. Nature570, 491–495 (2019). [5]De Croon, G., De Clercq, K., Ruijsink, R., Remes, B. & De Wagter, C. Design, aerodynamics, and vision-based control of the DelFly. Int. J. Micro Air Veh. 1, 71–97 (2009). [6]Phan, H. V., Kang, T. & Park, H. C. Design and stable flight of a 21?g insect-like tailless flapping wing micro air vehicle with angular rates feedback control. Bioinspir. Biomim. 12, 036006 (2017). [7]Mellinger, D. & Kumar, V. Minimum snap trajectory generation and control for quadrotors. In Proc. IEEE International Conference on Robotics and Automation 2520–2525 (IEEE, 2011). [8]Elijah, T., Jamisola, R. S., Tjiparuro, Z. & Namoshe, M. A review on control and maneuvering of cooperative fixed-wing drones. Int. J. Dyn. Control 9, 1332–1349 (2021). [9]Chirarattananon, P. et al. Dynamics and flight control of a flapping-wing robotic insect in the presence of wind gusts. Interface Focus 7, 20160080 (2017). [10]Baek, S. S., Bermudez, F. L. G. & Fearing, R. S. Flight control for target seeking by 13 gram ornithopter. In Proc. IEEE/RSJ International Conference on Intelligent Robots and Systems2674–2681 (IEEE, 2011). [11]Shin, H. S. et al. Bio‐inspired large‐area soft sensing skins to measure UAV wing deformation in flight. Adv. Funct. Mater. 31, 2100679 (2021). [12]Tong, S., Weiping, Z., Jiawang, M. & Zihao, C. Research progress on control of bioinspired flapping-wing micro air vehicles. In Proc. IEEE International Conference on Unmanned Systems842–847 (IEEE, 2019). [13]Woolf, P. J. Chemical Process Dynamics and Controls (Univ. Michigan Engineering Controls Group, 2009). [14]Warrick, D. R., Tobalske, B. W. & Powers, D. R. Aerodynamics of the hovering hummingbird. Nature 435, 1094–1097 (2005). [15]Wainwright, P. C. How hummingbirds stay nimble on the wing. Science 359, 636–637 (2018). [16]Dakin, R., Segre, P. S., Straw, A. D. & Altshuler, D. L. Morphology, muscle capacity, skill, and maneuvering ability in hummingbirds. Science359, 653–657 (2018). [17]Klaassen van Oorschot B, Mistick E A, Tobalske B W. Aerodynamic consequences of wing morphing during emulated take-off and gliding in birds[J]. Journal of Experimental Biology, 2016, 219(19): 3146-3154. [18]Tucker V A. Drag reduction by wing tip slots in a gliding Harris’ hawk, Parabuteo unicinctus[J]. Journal of experimental biology, 1995, 198(3): 775-781. [19]KleinHeerenbrink M, Warfvinge K, Hedenstr?m A. Wake analysis of aerodynamic components for the glide envelope of a jackdaw (Corvus monedula)[J]. Journal of experimental Biology, 2016, 219(10): 1572-1581. [20]Matloff L Y, Chang E, Feo T J, et al. How flight feathers stick together to form a continuous morphing wing[J]. Science, 2020, 367(6475): 293-297. [21]Clark C J, Elias D O, Prum R O. Aeroelastic flutter produces hummingbird feather songs[J]. Science, 2011, 333(6048): 1430-1433. [22]Brown R E, Fedde M R. Airflow sensors in the avian wing[J]. Journal of experimental biology, 1993, 179(1): 13-30. [23]H?rster W. Histological and electrophysiological investigations on the vibration-sensitive receptors (Herbst corpuscles) in the wing of the pigeon (Columba livia)[J]. Journal of Comparative Physiology A, 1990, 166: 663-673. [24]吴锦武, 李祖文. 基于 PVDF 压电传感器的微型扑翼机升力特性研究[J]. 压电与声光, 2012, 34(5): 712-714. [25]Zhao F, Li T, Gu Y, et al. Flexible Piezoelectric Sensor Enhanced by Ordered Piezoelectric Composite Material for Three-Dimensional Force Detection[J]. ACS Applied Materials & Interfaces, 2024, 16(48): 66543-66551. [26]Tao J, Wang Y, Zheng X, et al. A review: Polyacrylonitrile as high-performance piezoelectric materials[J]. Nano Energy, 2023: 108987. [27]Jayaram K, Jafferis N T, Doshi N, et al. Concomitant sensing and actuation for piezoelectric microrobots[J]. Smart Materials and Structures, 2018, 27(6): 065028. [28]Xiong W, Zhu C, Guo D, et al. Bio-inspired, intelligent flexible sensing skin for multifunctional flying perception[J]. Nano Energy, 2021, 90: 106550. [29]Liu Q, Li Q, Fang Z, et al. Piezoelectric energy harvesting for flapping wing micro air vehicle and flapping wing sensing based on flexible polyvinylidene fluoride[J]. Applied Sciences, 2021, 11(3): 1166. [30]Hou K, Tan T, Wang Z, et al. Scarab Beetle‐Inspired Embodied‐Energy Membranous‐Wing Robot with Flapping‐Collision Piezo‐Mechanoreception and Mobile Environmental Monitoring[J]. Advanced Functional Materials, 2024, 34(10): 2303745. [31]Li Q, Tan T, Wang B, et al. Avian-inspired embodied perception in biohybrid flapping-wing robotics[J]. Nature Communications, 2024, 15(1): 9099. [32]王代华, 周德高, 刘建胜, 等. PVDF压电薄膜振动传感器及其信号处理系统[J]. 压电与声光, 1999, (02): 43-47. [33] 赵丹, 肖继学,刘一. 智能传感器技术综述[J]. 传感器与微系统, 2014, 33(09):4-7. [34] 刘博, 王明烁, 李永, 等. 深度学习在时空序列预测中的应用综述[J]. 北京工业大学学报, 2021, 47(08): 925-941. [35] Beuken L G, Shin H S, Bergreiter S, et al. Decoding dynamic state properties from distributed strain sensing on sUAS[C]. AIAA SCITECH 2024 Forum. 2024: 0962. [36] Gong Z, Di W, Jiang Y, et al. Flexible calorimetric flow sensor with unprecedented sensitivity and directional resolution for multiple flight parameter detection[J]. Nature Communications, 2024, 15(1): 3091. [37] Leclerc J R, Worden K, Staszewski W J, et al. Impact detection in an aircraft composite panel—A neural-network approach[J]. Journal of Sound and Vibration, 2007, 299(3): 672-682. [38] Sharif-Khodaei Z, Ghajari M, Aliabadi M H. Determination of impact location on composite stiffened panels[J]. Smart Materials and Structures, 2012, 21(10): 105026. [39] Xiong W, Zhu C, Guo D, et al. Bio-inspired, intelligent flexible sensing skin for multifunctional flying perception[J]. Nano Energy, 2021, 90: 106550. [40] De Simone M E, Ciampa F, Meo M. A hierarchical method for the impact force reconstruction in composite structures[J]. Smart Materials and Structures, 2019, 28(8): 085022. [41] Ji M, Sekiguchi Y, Inaba K, et al. Forward and inverse analysis of transient responses for a cantilevered rectangular plate under normal and oblique impact loadings[J]. International Journal of Impact Engineering, 2023, 174: 104514. [42] Tagliabue A, Paris A, Kim S, et al. Touch the wind: Simultaneous airflow, drag and interaction sensing on a multirotor[C]. 2020 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS). 2020: 1645-1652. [43] Li Q, Tan T, Wang B, et al. Avian-inspired embodied perception in biohybrid flapping-wing robotics[J]. Nature Communications, 2024, 15(1): 9099. [44] Kim T, Hong I, Im S, et al. Wing-strain-based flight control of flapping-wing drones through reinforcement learning[J]. Nature Machine Intelligence, 2024, 6(9): 992-1005. [45] Mao Q, Zhu R. Enhanced robotic tactile perception with spatiotemporal sensing and logical reasoning for robust object recognition[J]. Applied Physics Reviews, 2024, 11(2). [46] Hu F, Zhang L, Yang X, et al. EEG-Based driver fatigue detection using spatio-temporal fusion network with brain region partitioning strategy[J]. IEEE Transactions on Intelligent Transportation Systems, 2024. [47] Chen X, Cai S, Yu L, et al. A novel CNN-BiLSTM ensemble model with attention mechanism for sit-to-stand phase identification using wearable inertial sensors[J]. IEEE Transactions on Neural Systems and Rehabilitation Engineering, 2024, 32: 1068-1077. (五) 创新点与项目特色 构建时空特征联合解码的深度神经网络模型和仿生/生物异构数据库迁移学习方法,建立环境流场、本体运动的飞行状态信息感知方法,实现生物-机器跨域感知,为扑翼飞行提供兼具生物和飞行器适应性的具身感知算法。 (六) 技术路线、拟解决的问题及预期成果 1.技术路线 本项目拟结合理论研究、实验研究与人工智能算法,首先通过电生理实验,研究昆虫在不同运动模式下的电生理响应特性,以为仿生机械感知系统设计提供生物学理论依据。随后,搭建仿生膜翼多自由度运动平台,模拟昆虫飞行工况,并构建包含多种飞行状态的电信号数据库,为后续的数据分析提供基础。在此基础上,利用深度学习方法解析电信号的复杂时空特征,建立膜翼飞行器的升阻力特征重构与运动状态参数的识别方法,以实现精确的飞行状态识别。最后,应用迁移学习技术,构建卷积神经网络,实现扑翼机器人飞行状态参数的连续感知,验证扑翼飞行器具身气动感知能力的有效性,从而为仿生飞行器的智能感知与控制提供理论与技术支持。 2.拟解决的问题 (1)扑翼飞行器飞行状态参数的连续具身气动感知方法 现阶段扑翼飞行器在机动性、操作性和稳定性上仍逊于真实鸟类,且因传感器数据建模复杂、实飞数据获取困难,感知技术验证多限于室内风洞环境下的离散信息分类,缺乏连续飞行状态识别方法,导致其自主飞行能力受限。本研究搭建搭建仿生膜翼多自由度运动平台,采用基于模型迁移学习方法,建立从离散信息回归网络到连续信息回归网络,实现实飞中扑动频率、扑动角度、飞行速度及攻角等参数的连续气动感知,为扑翼飞行器自主飞行提供技术支撑。 3.预期成果 建立昆虫电生理-运动状态数据库和仿生膜翼运动参数-压电信号数据库,揭示昆虫运动姿态-自然环境-电生理信号的复杂映射关系,提出仿生扑翼飞行状态参数的集成化识别和动态重构方法,为实现扑翼飞行器具身感知提供仿生智能感知方法支持。 (七) 项目研究进度安排 2025.4-2025.6 搭建昆虫电生理实验平台并完成相关测试 2025.6-2025.9 构建飞行工况-电信号数据库 2025.9-2025.12 基于深度学习方法解析电信号的复杂时空特征,建立膜翼升阻力特征重构以及运动状态参数的识别方法。 2025.12-2026.4 通过迁移学习构建能连续感知扑翼机器人飞行状态参数的卷积神经网络,验证扑翼飞行器的具身气动感知能力 (八) 已有基础 1. 与本项目有关的研究积累和已取得的成绩 (1)扑翼飞行器的设计和分析 实验室在扑翼飞行器方面已有一定的研究基础。已提出具有压电机械感知和环境监测功能的柔性膜翅扑翼飞行器,其机翼通过膜翅上的压电材料感知机翼拍频、变形和碰撞;提出一种受鸟类启发的生物混合扑翼机器人的具身感知方法,将羽毛和柔性压电材料集成作为压电机械感受器,通过深度学习实现了对扑频、风速等飞行参数的识别(图1)。另外已提出大攻角非定常非线性半解析气动模型。这些基础可以为本项目中仿昆虫扑翼飞行器的膜翼设计和智能感知提供技术基础,为扑翼非线性大攻角气动模型提供理论参考。
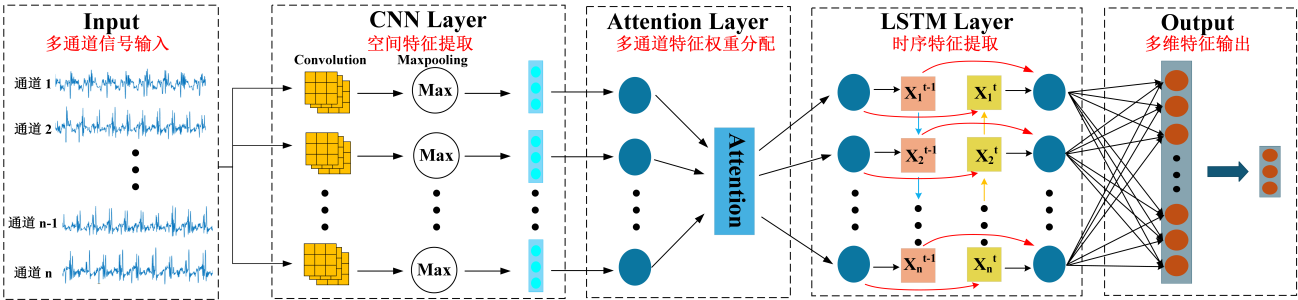
发表的相关论文如下: Hou K Y, Tan T, Wang Z M, Wang B L, Yan Z M*, Scarab beetle-inspired embodied-energy membranous-wing robot with flapping-collision piezo-mechano reception and mobile environmental monitoring. Advanced Functional Materials, 2024, 34(10), 2303745. Li Q, Tan T, Wang B L, Yan Z M*, Avian-inspired embodied perception in biohybrid flapping-wing robotics. Nature Communications, 2024, 15, 9099. Yan Z M*, Taha H E, Hajj M R, Geometrically-exact unsteady model for airfoils undergoing large amplitude maneuvers. Aerospace Science and Technology, 39, 293-306, 2014. Yan Z M*, Taha H E, Hajj M R, Effects of aerodynamics modeling on optimum wing kinematics of hovering MAVs. Aerospace Science and Technology, 45, 39-49, 2015. (2)压电感知功能 实验室长期从事压电智能结构研究,通过将压电材料和超材料设计、机器学习、人机交互集成实现了多种压电智能传感功能。已基于压电材料开发了一种模块化双稳态机械超材料,可以一体化实现自供电感知、能量采集和机械逻辑运算;通过将压电薄膜与超材料集成已开发一种用于实时监测和评估握力特性的超材料传感器(图2)。 发表的相关论文如下: Jiang R J, Chen Y H, Wang Z M, Tan T*, Yan Z M*, Ma S P, Modular bistable mechanical metamaterials: A versatile platform for piezoelectric self-charging, sensing, and logic operations, Materials Today, 2025. Chen Y H, Li T R, Wang Z M, Yan Z M, De V R, Tan T, A metamaterial computational multi-sensor of grip-strength properties with point-of-care human-computer interaction. Advanced Science, 2023, 2304091. 2. 已具备的条件,尚缺少的条件及解决方法 (1)昆虫电生理实验 已购买BIOPAC MP36R 四通道电生理信号数据采集单元。对于昆虫电生理信号采集相关的方案尚待完善。 (2)扑翼飞行具身感知算法模型 ①混合架构神经网络模型 针对扑动频率、扑动角、冲程面内外偏离角、俯仰角和风速、风向六维运动参数,从数据库中提取训练样本并进行预处理:通过小波阈值去噪消除高频干扰,采用主成分分析(PCA)提取信号时频域主特征。构建CNN-LSTM-Attention混合网络模型,采用多输入单输出架构分别解析各运动参数——卷积层(CNN)提取空间分布特征,双向长短期记忆网络(BiLSTM)捕捉时序相关性,注意力机制动态加权关键感知通道。以均方误差(MSE)为损失函数,结合自适应矩估计(Adam)优化器更新梯度,通过L2正则化与Dropout策略抑制过拟合,验证感知系统在±15%湍流强度扰动下的鲁棒性。
②升阻力曲线重构算法 将预处理后的环境气流参数、本体运动信息与压电信号进行线性加权融合,构建多模态输入特征矩阵。开发基于核主成分分析(KPCA)的载荷降维算法,将高维升阻力数据映射至3维潜空间;设计多输出卷积神经网络(MO-CNN),通过并行卷积分支学习电压信号与潜变量间的非线性映射关系。采用灰狼优化算法(GWO)迭代搜索最优超参数组合,以均方根误差(RMSE)为适应度函数,最终通过逆变换重构升力系数(CL)与阻力系数(CD)曲线,精度达R2>0.9。 ③扑翼飞行感知迁移方法 基于模型迁移理论,截取源域(仿生翼)训练网络中的CNN-LSTM层作为特征提取器,结合目标域(扑翼飞行器)新增的Attention层与全连接层构建迁移网络。采用微调(Fine-tune)策略:以较低学习率更新高层参数,利用动态飞行工况样本进行适配训练。通过运动捕捉系统实时获取飞行器六自由度姿态数据,与网络预测结果进行交叉验证。同步建立昆虫生理电信号-气动载荷映射模型:将迁移学习方法逆向应用于活体昆虫电生理数据库,解析钟形感受器放电频率与瞬时升力波动的非线性关系,揭示昆虫感知气动载荷的生物编码机制。 (3)扑翼飞行器样机设计 实验室已有相关基础,见上文。 (4)风洞 海洋工程全国重点实验室的多功能风洞具有多种试验段,高速试验段的尺寸为3m×2.5m×16m,最大风速60m/s,可用于风电设施结构部件、高速运动体的气动载荷、风压分布及其流态影响测试;低速试验段尺寸6m×3.5m×14m,最大风速20m/s,可用于模拟桥梁、体育场等超大型建筑物和机场等建筑群、船舶与海洋结构物上层建筑物的气动载荷、气动弹性响应和风压分布。基于此平台的多功能风洞,申请人可展开仿生扑翼在不同风速中对环境气流、气动载荷及本体运动的感知测试。 (5)相机阵列 上海交通大学船舶海洋与建筑工程学院工程力学实验中心是力学国家级实验教学示范中心,中心配备有激光测振实验室、LMS模态测试系统实验室、仿真实验室、高速相机阵列运动捕捉系统等,具备一流的试验环境。其中运动捕捉系统由八台不同空间位置的高速摄像机组成阵列,通过采集不同视角的照片实现对标记点的空间定位,可以为本项目中扑翼飞行器的运动捕捉提供实验设备支持。 (6)其他设备 智能结构实验室拥有立体光刻(SLA)3D打印机、PIV测试系统、万能试验机、六轴仪、高速摄像机、多通道数据采集系统、功率放大器、信号发生器、医用信号采集仪MP36R,可为压电结构和仿生扑翼的制备与力电性能测试以及昆虫膜翼的电生理测试提供保障。课题组具备充分的计算资源保障,小规模计算采用课题组星蕴计算模拟平台,大规模计算工作可使用上海交通大学高性能计算服务。 |